
Cross Channel AIS, part 2

Panbo friend John C. came back from more sailing aboard Solent Blue to discover that his overview photo of English Channel AIS traffic had stirred up quite a conversation. So he adds this:
The original photo was intended to show the number of AIS targets received from a 22 metre aerial whilst sailing across some busy shipping lanes. I don’t routinely operate the equipment on 48 mile range other than to get a quick view of what is coming my way. Actually I do have some other photos taken in the same few minutes which depict a more normal operating practice at least for me.
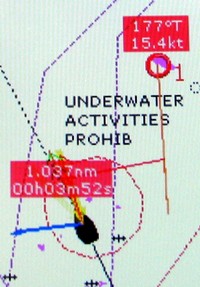
Image 4828 {above} was taken about 4 minutes earlier, and shows the same shipping. The range is 6 miles, and the trend lines both for my yacht and the AIS targets is 6 minutes long. The target to the NW at 19.8 kts was the “threat” – I found that the CPA calculations from the E80 based on AIS were much more accurate that I get off MARPA. Indeed I did pass about 1/2 a mile astern of her, the Al Motanabbi a 925 feet long conta
iner ship. The visibility was about a mile and I just saw her in the mist. I never made a visual contact with any of the other ships.
One point to note is how the E80 displays the CPA – notice how there is no clue as to where the CPA will be. Compare that to the other image taken about 90 minutes earlier and showing a MARPA CPA with a nice graphic showing where the CPA will be (red lines). {The CAPN is also a good example — ed}. One hopes Raymarine will consider making their AIS and MARPA graphics similar.
Here is a radar question for your team! When I am travelling north, my radar alignment is 0 degrees, i.e. it lines up with the chart without correction. When I face south, I need a 5.5 degree shift to make things line up with the chart – this happens for isolated targets like bouys and for block targets like harbour walls. Is there a correction setting for this?
 iner ship. The visibility was about a mile and I just saw her in the mist. I never made a visual contact with any of the other ships.
iner ship. The visibility was about a mile and I just saw her in the mist. I never made a visual contact with any of the other ships.Thanks, John, and go “Team”!












Have you verified the accuracy of your heading sensor (fluxgate compass, gyro compass, etc.) when on both headings?
John, You’re experiencing the limitations of accuracy for a flux gate compass. The radar overlay uses the compass bearing to determine the correct overlay position. Any errors in the compass bearing will result in erros in the radar overlay.
I had the same issues while setting mine. I have a Raymarine system and re-span the compass late last year (I re-do it every 6 months or so).
When spinning the compass, here are a few tips I learnt from my electronics guy:
1. While spinning at the requisite 1 rev in > 2 mins, do it by piloting the vessel in a large circle rather than spinning on an axis. This allows you to reduce the rate of spin for the compass and even out the angular velocity.
2. Then you go through a period of offsetting the compass reading against motion vectors using your GPS. Go in cardinal directions adjusting the flux compass until the error in each direction is about the same. In my case it was about 2 degrees.
Once you’ve evened out the error in all directions, you can futher adjust the radar overlay using one of the options in the Raymarine display (sorry, can’t remember where it is – in the soft button menus, perhaps?).
Good luck!
Martin