
MIBS ME, lots happening, all good!

Instead of being “released” in Miami last week, my poor cranium got stuffed to the cobwebbed rafters. Admittedly, there is a phenomenon whereby the longer I cover marine electronics, the better I get to know the developers and the more they want to tell me about their latest projects. But there’s something else going on, too: I believe the pace of innovation is increasing (and some healthy trends are emerging). I’ll try to hit a few examples today, but it may take weeks to detail all the goodness I saw at the show…
I did Tweet about some major ME news before cranial overload, and it was not coincidental that the first was about how MaxSea TimeZero, and eventually NavNet 3D, will support ActiveCaptain POI info. I had a strong inkling about this announcement because (I’m proud to note) I had a hand in getting the parties together. At any rate, this is big news for once-POI-weak TimeZero, and for ActiveCaptain (as well explained by the Siegels here), and for the concept of user generated data in general. And the relationship is not exclusive to either party — one of those positive trends — so MaxSea/Furuno is free to layer in other sources, and other manufacturers are free to pursue ActiveCaptain integration. Several were more responsive to my ramblings on the subject once the community data was being shown off in the big Furuno booth. Where you could also see some big improvements to TimeZero/NN3D vector chart presentation, regardless of whether the underlying data was NOAA, Navionics, or the new Jeppesen C-Map.
 I was pleasantly surprised by all the advancements seen the in Simrad/Lowrance booth. First up was complete Simrad autopilot control from the NSE MFD, including calibration, the works. You will be able to hang an autopilot off an NSE without buying a single control head, or have a head at one station but not another. Details of the implementation look excellent, but almost bigger in my mind is the corporate daring involved. Imagine the meetings: “What, give up head sales?!?”…”Yes, but if you give customers more choice, they’ll choose us!?!” It’s a general trend, I hope, and one we may also see applied to Broadband Radar, even if the first intriguing instance was shut down (temporarily, maybe?). Navico isn’t willing to reveal its “plan for third party BR24 integration” until March, but apparently there is a “plan,” and that sounds good.
I was pleasantly surprised by all the advancements seen the in Simrad/Lowrance booth. First up was complete Simrad autopilot control from the NSE MFD, including calibration, the works. You will be able to hang an autopilot off an NSE without buying a single control head, or have a head at one station but not another. Details of the implementation look excellent, but almost bigger in my mind is the corporate daring involved. Imagine the meetings: “What, give up head sales?!?”…”Yes, but if you give customers more choice, they’ll choose us!?!” It’s a general trend, I hope, and one we may also see applied to Broadband Radar, even if the first intriguing instance was shut down (temporarily, maybe?). Navico isn’t willing to reveal its “plan for third party BR24 integration” until March, but apparently there is a “plan,” and that sounds good.
Meanwhile Broadband Radar itself is getting backward compatible True Motion and 36 rpm tracking modes with new Simrad and Lowrance software updates coming out in April. Plus Lowrance HDS is getting monitoring integration with DNA’s DSS switching system, and Simrad’s NSE is getting even fuller integration with BEP’s new CZone distributed power and control system. (In the photo below, please ignore the “Light” dialog but understand that either the NSE or the wireless fob can control custom CZone configurations of lights, pumps, alarms, whatever.) These developments are potentially huge, and both involve NMEA 2000, but online details beyond those links are scarce. I will certainly detail when possible.

FLIR hosted another fabulous thermal cruise (freshly documented on the WaveTrain), where I learned about some excellent features. One I’d simply missed: The expanding First Mate handheld series includes a shoe which lets you mount the camera securely with external power and even a video feed to a larger screen. New is an SDK that permits any MFD or software developer to control a more truly fixed M-Series camera via the same Ethernet pipe used by its standard controller. Move down the page for an example…
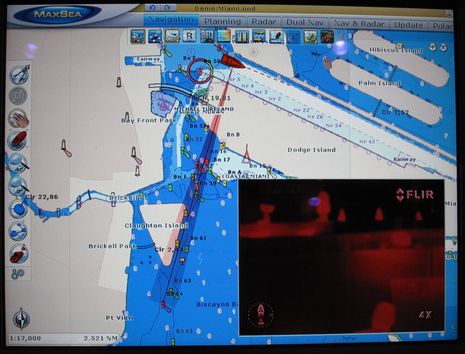
 Furuno/MaxSea was the first to show what a FLIR interface can do (not surprising given the anti-pirate project), and it looked great. I saw how you could use MaxSea to make an M-636 quickly pan to waypoints, marpa and AIS targets, or just anywhere you clicked on the chart. Check out how the field of view is shown graphically. It can autotrack such targets, too, tweak the cam’s vertical angle based on range, and it even automatically slews to an MOB if you ever have to hit the alarm. These advanced controls make a very valuable (in two ways) camera a lot more so, I think, and it’s terriffic that any developer can now add such integration.
Furuno/MaxSea was the first to show what a FLIR interface can do (not surprising given the anti-pirate project), and it looked great. I saw how you could use MaxSea to make an M-636 quickly pan to waypoints, marpa and AIS targets, or just anywhere you clicked on the chart. Check out how the field of view is shown graphically. It can autotrack such targets, too, tweak the cam’s vertical angle based on range, and it even automatically slews to an MOB if you ever have to hit the alarm. These advanced controls make a very valuable (in two ways) camera a lot more so, I think, and it’s terriffic that any developer can now add such integration.
 OK, almost done for today (more tomorrow), but thought I’d close with a note about Nexus instrument systems, which I learned a lot more about in Miami. The gear isn’t exactly new, but easy access to it (and support for it) may be, as the company has just gotten solid U.S. distribution in the form of Ocean Equipment. I’m impressed that the whole line of cruising and racing products works together, so you can mix them any whichway, and how well all of it can be calibrated, monitored, and logged with free Nexus PC software. It’s neat, for instance, how you can instantly and easily change a data page label on one of these big NXR displays, though I do wish I’d used the nine characters to spell out “TAKESURVEY“!
OK, almost done for today (more tomorrow), but thought I’d close with a note about Nexus instrument systems, which I learned a lot more about in Miami. The gear isn’t exactly new, but easy access to it (and support for it) may be, as the company has just gotten solid U.S. distribution in the form of Ocean Equipment. I’m impressed that the whole line of cruising and racing products works together, so you can mix them any whichway, and how well all of it can be calibrated, monitored, and logged with free Nexus PC software. It’s neat, for instance, how you can instantly and easily change a data page label on one of these big NXR displays, though I do wish I’d used the nine characters to spell out “TAKESURVEY“!
 PS I did find the Cranial Release Technique web site, but I still have little idea what it’s actually about.
PS I did find the Cranial Release Technique web site, but I still have little idea what it’s actually about.








Note that there’s a bit more about my Nexus lessons now in a comment on this old entry:
https://panbo.com/archives/2006/11/a_new_nexus_and_new_systems.html
Does that FLIR integration work with NN3D’s as well as Maxsea?
That’s cool!
As with ActiveCaptain POI layers, the feature will be added to NavNet 3D after being wrung out a bit in MaxSea TZ. Seems like a sensible use of the common code base.
I also asked if you have to have MS TZ Explorer and a Furuno NN3D MFD in order to get the FLIR camera feature, as with, say, UHD radar. The answer was yes and no. In other words, an advanced third party hardware feature like this will require the more expensive Explorer software but not Furuno hardware.
Perhaps I am out of touch, but what do these abreviations mean?
NSE MFD
HDS
DNA DSS
SDK
NXR
Thanks,
Larry H
Sorry, Larry…I guess I do sound like I’m in the Navy sometimes. Here goes:
NSE MFD — NSE is just a Simrad model designation, but it does stand for NorthStar Edition. MFD is a fairly common acronym for multifunction display.
HDS — A Lowrance model name, stands for High Definition System
DNA DSS — Digital Switching Systems is a division of DNA Corp.
SDK — Geek speak for a Software Development Kit, the code and instructions needed to interface with a certain hardware and/or software system.
NXR — A Nexus model name, probably standing for Nexus Racing.
That’s a long entry I wrote, with lots of links, and I think you’ll find that the links usually shed light on the acronyms you may not already be familiar with them. How I roll 😉
How about Active Captain & Coastal Explorer?
Do you think they’ll fix MaxSea so that when you start it up it doesn’t disable your MFD before they implement all these whizzy new features?
Seriously, wouldn’t it be a good idea to create a stable platform before adding new features like Navionics charts and Active Captain. Everybody likes new features, but if the underlying product is not reliable for mission critical navigation, are the new features really relevant?
I wonder whether Lowrance plans to integrate the BEP C-Zone system also into their HDS series? I just installed a BEP C-ZONE and a Lowrance HDS-10m on a 52″ Racer-Cruiser. The system seems to be a bit overdone on this simple layed-out yacht but would be perfect on full cruisers above 45-50 feet. The battery voltages and tank information is already read by the Lowrance MFD – it would be perfect to also have the device switching capability on the MFD.
Hi Russ, I haven’t used the combination very much yet, but have not experienced a problem with the MFD12 and MS TZ, nor have I heard much complaining from others. Don’t I recall that you also termed your MFD8 unfit for mission critical navigation at one point, before MS TZ? I never heard that level of criticism elsewhere either.
I also asked about your reported problems with Navionics DataCore charts for the Pacific. The problem I was told is the lack of a detailed Navionics base map. I could see how that would be a pain for very large area planning, but it didn’t seem to affect the data at normal chart scales. At any rate, Furuno/MaxSea demoed lots of improvements in the vector presentation for all three types of vector data, C-Map is providing an excellent base map that apparently will be available to all, and Navionics is supposed to as well.
Thanks, Chriggel. I know the code bases for HDS and NSE overlap quite a bit, so HDS support for CZone is certainly possible. But I also heard the Lowrance product manager predict growing pains with digital switching for all integrated systems, and it certainly is bleeding edge stuff. The implication was that Lowrance would rather deal with the monitoring side of DSS (whose gear is used much more by its target market) for now, and let Simrad work out the inevitable kinks with CZone, which makes sense.
PS: CZone info is scarce online, and I’m sure I’m not the only one who would like to hear more about how your system installed and how it works.
CZone brochure PDF here:
http://bit.ly/bcBAXP
Ben: Since you haven’t used the Furuno MFD and MSTZ together very much it’s no surprise you haven’t encountered the problem. And since you drive a motor yacht the work around would probably not bother you. Don’t shoot the messenger, I don’t make this stuff up.
Yes, I previously said the MFD was not suitable for mission critical navigation. The early software releases were very unstable. I experienced several untimely crashes, including one during a difficult situation with squalls and ships which led me to that conclusion. Subsequent software releases have stabilized the MFD, or so I thought.
When release 1.8.1 of MSTZ is started when the MFD is already running, the MFD will lose all sensor input (e.g., GPS, boat instruments, AIS, etc.) for 11 minutes, then may or may not recover. Since MSTZ is expecting to receive it’s GPS and other data from the MFD, all Furuno / MSTZ navigational resources are lost during this period. Another reader, who will probably remain silent due to professional considerations, has also documented this on an MFD/12, though the down time is only 2 minutes.
The two products will co-exist only if MSTZ is started first, and then left running. This is probably an acceptable work around for a motor yacht or commercial vessel. However, for a sailing yacht with no need to have MSTZ running 24/7, it is a big problem. Effectively MSTZ cannot be used while underway since it stops the MFD which then stops the flow of navigational information to the autopilot which is a big problem on a yacht with only one person standing watch.
Furuno / MaxSea have reproduced the problem and have been aware of it since at least mid-December.
With regard to the charts, the problems include islands that are mislabeled, and islands that disappear entirely at moderate range. For example Tahiti is not on a chart with a scale of 120nm. When planning a multiple day passage the whole point of navigational charts is to be able to see what land masses and hazards should be avoided. The problems are with vector charts in the Caribbean, South America / Galapagos, and Pacific Islands. Since a picture is worth 1,000 words, I will soon post screen shots of the various chart issues on my web site and readers can make their own assessment.
I’m dependent on the charts and software that Furuno / MapMedia / MaxSea actually have available for customers, not the promise of something that may ship at an unspecified date in the future. Of course there are no problems with press releases and demos, they don’t have to work in the real world. I think it benefits all customers if manufacturers focus on producing reliable products rather than adding new features to an unstable foundation.
The technology to have an MFD as the only control for an autopilot has been around for quite some time. And the wisdom NOT to do that has been around for just as long, at least until now.
I also wonder if Russ will ever be happy. Maybe he’ll trade places for most of our real problems.
Well, cranial release is a form of manual medicine where headaches, neck spasms, etc. can be addressed without drugs by applying pressure with your fingers to various bone plates making up the skull… I have training in it and it is an interesting technique…
However, I am a, point A -> point B, personality… The past 35 years I have found it working better in my hands to take the head and neck, position them properly, and then rotate with enough force to produce a satisfactory “karrrunch” (gratifying to both parties)to reduce muscle spasms and pain…
denny-o
Arnie, it’s notable that the “Standby/Auto” key on the NSE is supposedly totally independent of the MFD’s operating system. The whole thing can crash but you can still get the AP into Standby.
Russ, By your own definitions the problem you’re reporting is only ‘critical’ on a single handed vessel that wants to use an MFD and MSTZ simultaneously, but not leave MSTZ running constantly, and has its AP connected to the same networked heading and/or wind sensor. That’s a small cohort! And the downtime involved — i.e. the period said single hander has to hand steer — is 11 minutes for the MFD8 and 2 for the MFD12?
While the situation certainly isn’t right for such high-end and supposedly compatible systems, and is undoubtedly annoying, I wouldn’t presume to demand that Furuno/Maxsea stop all other work to get it fixed. For one thing, I have no idea what it will take to get it fixed. For another, some of the work they’re doing — like all the across-the-board improvements to vector presentations — are quite arguably more important to existing users.
I will try to duplicate your issue, though, and see if it messes up other N2K gear on the backbone.
Ben: My mistake, you’re correct. It’s ok if MSTZ crashes the MFD, not really worth the resources to fix the problem.
Arnie: Of course the autopilot can be placed in Auto mode and track to a heading rather than a waypoint with no external inputs other than it’s dedicated heading sensor. That’s exactly what I did do when I first discovered this “benefit” of the integration between MSTZ and the MFD.
Hi Ben / Russ,
Been playing with the Actisense NGT-1-USB today and also have the MaxSea TZ / NN3D data lockup issue.
Interestingly it didn’t appear to mess up the n2k output of the MFD12
I hear a fix is imminently to be made available
On the NGT-1-USB very impressed makes fault finding troublesome n2k networks much easier (and solved a few niggles we had on the boat)
NN3D if its told to TX the speed over water PGN with no speed sensor on the DFF1 it outputs 0
Thus some devices that dont allow you to choose sources will flip between the MFD and say a DST800.
With the NGT i could see what ‘null’ parameters were being sent and turn them off, its also allows me to investigate a network lockup issue we had and isolate the (non certified according to the Actisense reading of the PGN) item that was causing it (I have contacted the manufacturer to see if a software upgrade is available)
Andy
“Times may be tough, but the lights are on at marine-electronics R&D centers around the globe.”
That’s the deck (subtitle) I wrote for a Feb. Cruising World roundup of 2010 electronics, and it felt right in Miami:
http://www.cruisingworld.com/gear-and-systems/for-the-navigator/the-next-new-things-1000081203.html
I just got MSTZ and haven’t tried to integrate it with my boat yet. For my needs, the MFD’s are more suitable anyway, so MSTZ will be used primarily for planning.
I am on a powerboat with lots of available power, but I turn all navigation equipment on before starting a trip and it stays on until I’m anchored or tied up. I think the power draw is a small price to pay for the added safety and convenience. I have 2 MFD12’s and a Standard Horizon CP500 (I kept it because the NN3D charts for Canada were delayed, and now I keep it because I like having a completely seperate system, just in case).
As to Furuno fixing the problem, I’m confident they will. I have never raised an issue they didn’t resolve somehow. Even their NN2 units were getting serious improvements after the NN3D was released. My old NN2 unit went from a 1.0 level firmware to the latest just before the NN3D release and I couldn’t believe the performance improvement. I would say the speed of everything was doubled at least.
I had an issue with MaxSea TZ Navigator not being able to link the charts I’d purchased for my NN3D earlier this week. I called Peter Prowant, who posted that it should work on Monday afternoon. By Tuesday afternoon all was working.
I called Furuno support for some MSTZ help figuring out how to fork a route from a waypoint that is shared by more than 2 routes already. It will only fork the first route. This is sort of annoying, but the Furuno rep stayed on the phone until he understood my issue and was able to replicate it. He’s raising the issue with developers. I don’t think this issue deserves much developer time (it’s not a big deal and likely won’t affect many users, and the workaround isn’t to hard anyway). My point is that this Tech has now fully documented the issue and raised it for repair if possible.
What other companies do this? I personally have a few stories of how Furuno has gone above and beyond to solve my problems (including shipping a replacement NN2 unit to me overnight when mine failed on a trip – out of warranty, at no cost to me for anything).
Obviously this was a problem unforeseen, but I feel confident they will resolve it somehow.
PS. I’ve heard many complaints of the Charts on NN3D. I have the raster charts only for the Eastern Great Lakes where I boat – and I can say that they are the most accurate and complete charts for my waters. I didn’t buy the Vector charts last year because I didn’t see what they could offer.
Hello everyone,
BEP’s website is slowly being updated with information on the CZone product. See below.
http://www.bepmarine.com/home-mainmenu-8/productcategory-190/overview
I Have also attached a temporary 7 day link to a complete information package on the CZone product. Due to the size I am unsure of the best way to share this information.
https://www.yousendit.com/dl?phi_action=app/orchestrateDownload&rurl=https%253A%252F%252Fwww.yousendit.com%252Ftransfer.php%253Faction%253Dbatch_download%2526batch_id%253DaHlSOU1ha0QwVWxFQlE9PQ
I would also like to advise that CZone is fully compatible with the Lowrance HDS product with the 3.0 Software release.
Hi AE,
I saw an additional BEP page on my Lowrance HDS-10m after upgrading to SW 3.0. Also the BEP configuration software found the Lowrance as an additional module. But the new page on my plotter has no function yet – did I miss some more configuration or do I have to wait for SW V3.1?
Cheers,
Chriggel
Hi Chriggel,
Firstly you will need to ensure that you have the Navico compatible firmware installed on your CZone modules. Below is a link to the Navico compatible software package.
https://www.yousendit.com/dl?phi_action=app/orchestrateDownload&rurl=https%253A%252F%252Fwww.yousendit.com%252Ftransfer.php%253Faction%253Dbatch_download%2526batch_id%253DaHlRN3RZNHYrV3hjR0E9PQ
You will also need to add the HDS as a DI (display interface) in the CZone configuration tool. Depending on the configuration you may also have to change the circuits to include the additional dispaly as a switch in order to control the desired loads.
It is also recommended that you install a Network Interface between the two networks, however will work without this device.
http://www.bepmarine.com/home-mainmenu-8/product-670/nmea-2000-network-bridge-interface-module
Cheers,
AE