
Airmar H2183 Improves Situational Awareness Feature on Raymarine
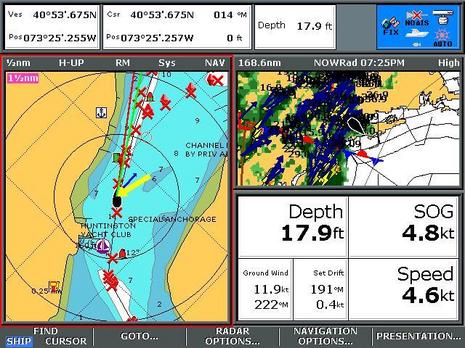
Check out all the vector arrows around Dan Corcoran’s Raymarine E-80 boat icon, as he steers Breeze Pleeze through Huntington Harbor as a storm closes in. Red is for heading, green for COG, blue for current, and yellow for wind. High performance sensors have made these vectors valuable for situational awareness of the current where he’s about to dock, and more, as Dan explains:
I am writing about the Airmar H2183 solid state heading sensor (covered in Panbo here) after my experience as a beta tester. Raymarine gets honorable mention in the title above for its role in making this compass especially useful at a time in recreational navigation when its too easy to cruise all day without taking a compass heading.
For this evaluation I have the H2183 connected via NMEA-2000 to my e-series chartplotter, Airmar USB to N2K gateway, and a PC with Airmar’s WeatherCaster PC software. The S1G autopilot on my boat is unaffected by the installation, as it has its own gyro-enhanced fluxgate compass (like the Raymarine Smart Heading Sensor) as a heading source. A CS4500 ultrasonic speed through water sensor in my configuration, no doubt enhances the set/drift measurements I address below. Although the gateway and PC are unnecessary, the addition creates one of those rare N2K devices that can be configured, monitored, field upgraded, and if desired, data logged from a PC, and supports the PB200 reviewed here as well.
The evaluation included motoring my sailboat at 7 knots, in unusually poor weather, over a period of one week on the return 150nm leg of our family vacation from Nantucket Bay to Huntington Bay, along with additional experiences sailing and motoring on Long Island Sound since then.
An explanation of some Raymarine e-series features pictured above is going to be useful. First, the e-series optionally offers a red compass heading line overlaying the water and land cartography features in line with the boat’s bow. The red line answers the question “what is that just ahead of us”, R8 or R10? Second, this chartplotter offers a green line that overlays the water and land features in the path of the boat based on GPS COG (course over ground). The red and green lines are not exactly the same thing. For example, the compass driven red heading line may show the boat icon proceeding safely down a channel while the green line predicts the boat will impact a buoy. The difference is often water current crossing the channel.
In this picture is a blue current arrow representing calculated set/drift that represents the force of the current acting on the boat, a yellow arrow represents the wind, the thickness of the blue and yellow arrow represents the velocity, e.g. a very thick blue line is a strong current.
While the GPS driven green line works flawlessly to improve situational awareness, I had always considered the red line noise, a constant reminder I could never get my compass calibrated just right across the entire compass rose. As for the blue arrow, I had considered it a form of ‘feature overload’ by Raymarine, especially since it often shows the current coming from improbable locations like beaches and bulk heads (like this example where 3 degrees of heading error becomes 90 degrees of set & drift error, causing the blue arrow to be useless).
My beliefs about noise and feature overload shifted during this H2183 evaluation to an appreciation of the situational awareness capabilities of the four lines and arrows. For example, while motoring, the red heading line pointed at the same land features on the chart as I was observing from my bow, even pinpoint features like a buoy half a mile away. In addition, the red line and green line merged when they should (if there is no current, or water current is parallel to the boat, this would be the proper alignment) eliminating that ‘noise’ I experienced for years. Also, when the red and green lines were different, it was telling me something I was interested to known like the effects of current or leeway (while sailing) on my boat, rather than annoying me with screen clutter.
This summer I had many opportunities to see the blue current arrow at work and consistently have found the set/drift measurements after the H2183 installation provide useful situational awareness when delivered to me as a blue current arrow. This is especially useful when maneuvering in harbors where I don’t have time to repeatedly look for visual clues while preparing for arrival and tracking boat traffic. The numerical set/drift values are also useful out in the middle of the water where there are few visual clues about changes in the current which can occur as much as an hour delayed from Long Island Sound predictions for the day.
In the image above the very thin (width is velocity) blue arrow is pointing from the boat icon towards 1 o’clock, indicating a weak current following the deepest contours of the channel. From 2 o’clock is a thick yellow arrow, indicating strong wind (the ‘X’ waypoints indicate a safe path through the mooring field). While it’s possible to have set/drift represented in numeric format as in the picture (191 degrees, 0.4 knots), it’s not nearly as helpful as having the blue arrow on the map!
With an accurate heading source, I now recognize that the software designers got it right. All four lines (red, green, blue and yellow) work well together to provide improved situational awareness.
During my evaluation, I observed the superimposed red and green lines (e.g. H2183 heading sensor = GPS SOG) while motoring in dynamic sea conditions and on all points of the compass rose, an indication of extraordinary accuracy, and came away impressed at how the H2183 is able to measure the earth’s magnetic field and consistently report a heading equal to the GPS COG even when being tossed about in poor weather. Clearly it was delivering within in its reported 1 degree of heading accuracy in static conditions, and 2 degree heading accuracy in dynamic conditions, on my first and only calibration attempt.
Another good use for the H2183 is in eliminating the loss of targets experienced when using MARPA with a standard (non gyro corrected) flux gate compass. The H2183 works real well for such purposes and comes already defaulted to the recommended 10 hz frequency recommended by Raymarine for the e-series.
A few caveats on the above before I close. First, when leveraging the high accuracy of the H2183 to measure set/drift it suddenly matters if your have sources of magnetism nearby! Boating products including Corrosion-X and SailKote have magnetic properties in their packaging (iron shaker balls maybe? Idiots !). Second, the ability to calculate current set/drift is impaired when sailing, the effects of leeway (e.g. 7 degrees) on a sailboat upwind render the values unusable. Third, when motoring in strong winds, the accuracy goes way down, especially in weak currents under 0.5 knots. By that I mean the accuracy of the set/drift calculation (the compass is still fabulous)
I didn’t go looking for improved situational awareness while testing or have an expectation that noise would be eliminated from my chartplotter heading vs. GPS lines, but those are the two things I value most from this product. What would you do with a more accurate heading source on your boat? How would it be valuable? Comment below …








{kind=link}
The red/green/blue lines on the Raymarine’s display are nothing new. The Airmar transducer just makes them more accurate.
I used a 2-3 year old Raymarine C80 chartplotter with conventional paddle speed transducer for a 3000 mile trek from Florida to Maine and back to Annapolis this year. This was on a 6 kt sailboat, so current sometimes had a noticable effect at that slow speed.
Most of the time the red/green arrows were within a few degrees of each other and I didn’t pay any attention to the difference, other than knowing that the green COG indicator was the one to watch to keep the boat in between the bouys.
But on a few occaisions it was significant. One was particularly memorable as entering the Cape May, NJ jetties from Delaware Bay, I was against a 3-4 kt cross current. In that situation, the two arrows were 40 degrees or so apart. Having the guts to hold a heading that was way, way off where I wanted to go was tough, but the display gave me the information I needed, immediately and without having to wait to watch my visual COG develop.
So, I guess my point is, this technology has been around for some time and is sometimes very useful. Keeping a conventional paddle tranducer calibrated helps. The new Airmar transducer will only make it better.
David
All those vectors are really useful, however they aren’t anything new per-se. My C70 using an old Autohelm Autopilot for a fast heading sensor and ST50 water+wind speed does all that too…
My point? you don’t need all the fancy+latest stuff to do this! It may be that your electronics are not fully integrated, or maybe they are and it’s simply that nobody ever turned on the options in your MFD.
Hi Dan
For those of us who use Raymarine E series and demand that the data presented be accurate your research is very informative.
You are using an Airmar PB200 which has it’s own heading sensor, is the H2183 necessary? How accurate is heading from the PB200?
Did you ever try Raymarine’s Smart Heading sensor? This is what I have and have not been happy with it’s accuracy. As you pointed out an error of just a few degrees will make set/drift completely inaccurate and also effect radar/chart overlay.
I would love to have the vectors displayed as you show but only if they are good information. As of now I only use the COG arrow. I will have to decide if the cost of the new transducers is worth the accuracy.
Dan,
I’ve had a number of years with my Raymarine E120, and its connection with the S2G (and later with the X30) course computer has given me very good and accurate results. Have you had an opportunity to compare the accuracy between the H2183 and your S1G? Depending on your application, you might need to multiplex the fast heading output with any other data you have going in on the E’s one NMEA 0183 input.
Joe
Bill asks “Did you ever try Raymarine’s Smart Heading sensor?”, yes, that is what I am comparing it to in this article.
Joe: I have compared autopilot performance of the S1G with and without the H2183 as a substitute for the fluxgate component, both in follow the compass and follow the wind mode. I hope to write about it next year.
Joe: If by accuracy do you mean compared to a handheld compass, the H2183 is far superior. If by accuracy do you mean that one product keeps your boat in a straighter line while traveling under autopilot, I would say there is no difference that appears on my charplotter using the track feature. For example you autopilot might misreport the compass heading by 3 degrees, but you otherwise stay in the straight line you selected when you press the AUTO button.
From a MARPA point of view, where a few degrees of magnetic error dosn’t matter I could not tell the difference between my smart heading sensor enhanced fluxgate and the H2183. Either source enables you to hold onto a target much much better than a standard fluxgate as you turn your boat.
ScottE: Actually my electronics are very integrated, but sure the arrow vector feature has been around at least 8 years that I can remember. The poin in the article above is that it was ahead of it’s time since tiny errors in heading (and speed also) render the current vector arrow useless. Click on the link within the article above ending in “blue arrow useless”. It takes you to a screen capture that should be familiar, the blue arrow incorrectly showing the current coming from improbable locations like beaches and bulk heads with just 3 degrees of heading error.
Dan:
How do you get such nice screen shots?
Is H2183 more accurate/faster then PB200 heading?
Bill
I actually think it’s great when software developers (that is, the guys writing the MFD code) anticipate the possibilities of their platform even if the sensors aren’t yet accurate enough to take advantage of the feature. Sensors *always* get better, as we’re seeing this cycle with the H2183, PB200, CS4500, Furuno SC30, etc.
And on that note, what other nav platforms — particularly PC-based ones — can display similar current and wind overlays? I just went through the Navnet 3D manual and neither the MFDs nor MaxSea seem to. What about RP CE, Nobeltec, or the new Simrad MFDs?
/afb
Dan, Sorry – by “you”, I didn’t mean to suggest that you specifically – I just meant that in a more general sense as I’ve found many boats (including mine when I bought it) that has a bunch of systems that can all talk common protocols, but which were never integrated, or at least not fully so.
A fast and accurate heading sensor is definitely important – and a lot of people already have one but don’t even know it! Autohelm/Raymarine autopilot computers will output heading on NMEA0183 at 1Hz. This should be sufficient for radar and drift vectors. Of course if you are lucky enough to have newer protocols and systems, then that’s certainly better!
Bill: The motion corrected wind on the PB200 is still A+++ in my book but the heading and GPS SOG/COG suffers a bit when the mast moves.
The H2183 has more axis of motion correction (3 axis) than the PB200’s compass has (1 axis), so they are not that comparable.
Airmar has a new version of the weather station on the way that will place the H2183 compass technology in the weather station making them equal.
Until I test I won’t know, but potentially the new weather station will then be identical to the H2183 if 50 feet of mast dosn’t matter, and could be better as it will be seperated from all the metals in the boat.
Although the H2183 is so good I can’t tell that engines, speakers or other things on my boat matter a bit, a few things do affect it on my boat including a bottle of SailKote (a “premium” marine lubricant affects my H2183 (iron shaker balls maybe? Idiots !), as does Corrosion-X, and on one day the contents of my crews backpack. All three wouldn’t be an issue if the compass is on my masthead.
For my fluxgate compass, I had to move that from it’s original position years ago as it was installed 12 inches from battery cables that fluctuated enough in magnetic field when the fridge cycling on/off to cause my autopilot to turn 3 degrees.
So to (hopefully accurately) answer my own question above, after the best review I could muster using available information — Rose Point and Jeppesen do not, unbelievably, publish their latest manuals online — it seems that none of the major PC charting programs can display current vectors, and wind vectors look doubtful as well.
Would love to hear from the publishers or from users of the latest versions of Nobeltec and RP CE whether that assessment is correct.
/afb
Coastal Explorer can put a wind rose around your vessel icon, Apparent or True, I think. Very few charting programs, or MFDs, calculate Set & Drift, let alone draw the vector. I’d guess the reason is that super accurate sensors are needed to make the calculation worthwhile. Raymarine has seemed more daring in this area for a long time.
Ben,
I am looking at the PB200 to put wind/weather on a PC that will also be running Rosepoint. I am not clear from the above postings – the PB200G – is that the updated version or do I need to wait for the new features that the H2183 has?
Ben,
I should add on the above posting – it is not for a sailboat, we have a trawler.
Last month I sailed from Northport, NY to Annapolis with a new H2183 and found a vast improvement in the straight line tracking of our ComNav, ComPilot autopilot. Instead of using the very primitive fluxgate compass that came with the autopilot I disconnected it and used the 0183 output from the H2183. One of the nice features of Airmar’s compass is the simultaneous, dual N2K and 0183 data output. This reduces the confusion of receiving slightly different HDG from different compasses. With only one HDG source I get the same data on the Garmin 4212, ComPilot, Laptop with Coastal Explorer and GMI-10. Now, if I can only get the binnacle compass to agree all would be perfect.
Henry, I don’t know why some outlets call the PB200 a PB200G, but they seem to be the same thing. I don’t think that Airmar has yet introduced a PB200 with a 3-axis rate gyro.
I’ve used the PB200 for wind, heading, and GPS with Coastal Explorer and many MFDs (radar overlay and MARPA), and it’s worked well (as long as you don’t put it in the beam of a magnetron radar ;-). Maretron’s ultrasonic weather station and solid state compass, and many NMEA 2000 GPS sensors, also work well, and act like an all-in-one when on the same network.
Nobody asked me about the weather screen.
That is a nearly live doppler image, updated every 5 minutes, and includes the direction and speed of storm cells, plus the red/blue line locating the front (updated every hour I think)
The weather forecast for the afternoon I took the screen capture was wet with t-storms, yet the day was beautiful as the forecasted rain stayed west of our position until well after 7pm. With the help of the Sirius weather feature I enjoyed the afternoon on Long Island Sound while most everyone else wrote off this weekend day and stayed off the water.
Although at the level of zoom its hard to see, I was arriving in very light rain with perhaps half an hour before the heavy stuff (note lightening icons and darker colors) moving from South to North arrived. I had a similiar display on my cell phone of the rain but could not make a similiar determination as to when the rain would arrive in my location without the boat icon offered on Sirius. While on a clear day you can pretty much guess your location on the cell phone, that’s not the case on a stormy day as the map features on most weather products are blot out the .
Somebody asked about screen captures.
All Raymarine A, C and E and G-Series systems (new widescreen and classic) have the ability to capture a screen image onto the inserted CF card.
Press and hold the data key in for a long press (about 2 seconds.) The unit will beep and the screen will freeze momentarily as is writes a bitmap (BMP) file onto the card. They are named and numbered sequentially DUMP001.BMP, DUMP002.BMP, DUMP003.BMP, etc.
You can then use your home computer and a CF reader to retrieve the images off of the card. This works in any mode, except for video inputs.
And yes, it can write bitmaps onto your inserted Navionics Chart Card (or any other inserted CF card.) If you do it to the chart card understand that you are doing so at your own risk! When you put the card in your PC, be careful what files you move from the card. If the file name does not start with DUMP, don’t move it!
Also, if you happen to do the long press and get a quick multi-beep, the display is telling you that your CF card is full.
Maybe slightly off topic, but: does anyone know if a Raymarine E series, connected to an X30 pilot via N2K (or Seatalk ng if you must), eliminate the need for the fast rate heading 0183 connection? There is no illumination of this in RM’s literature at all, and the tech support staff here in NA don’t seem to know anything about it.
You would think that heading data could be passed much faster on the N2K bus than is possible on 4800 baud serial.
Jim, I don’t have an answer for you about N2K/STNG but yes, there can be issues with fast heading sensor data on NMEA0183 at 4800bps. Fortunately there is a solution, which is to use a MUX that can do bitrate conversion. This is what I do with my C-70. All NMEA sources are fed via a Brookhouse MUX which has a special 38400bps loop on it and baudrate conversion and filtering.
This particular MUX has some very nice filtering features as well – for example I use it to convert SeaTalk from my ST50 instruments to NMEA0183, but due to bugs in the C-70 software (acknowledged by Raymarine, but won’t be fixed), there are problems if certain sentences comes in both from NMEA0183 and SeaTalk. With a filters on the MUX, it will disable SeaTalk-NMEA0183 conversion if the C-70 is powered up (which does it’s own conversion). This way I always have ST50 instrument data on my NMEA0183 bus, and the C-70 doesn’t freak out.
Whoops, due to an off-by-1-error in reading previous posts, my comment was for DDW. Sorry 🙂